Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
Community Tip - Visit the PTCooler (the community lounge) to get to know your fellow community members and check out some of Dale's Friday Humor posts! X
- Community
- ThingWorx
- ThingWorx Developers
- Re: How to control motor speed with ThingWorx
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
How to control motor speed with ThingWorx
Sep 01, 2015
07:04 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Sep 01, 2015
07:04 AM
How to control motor speed with ThingWorx
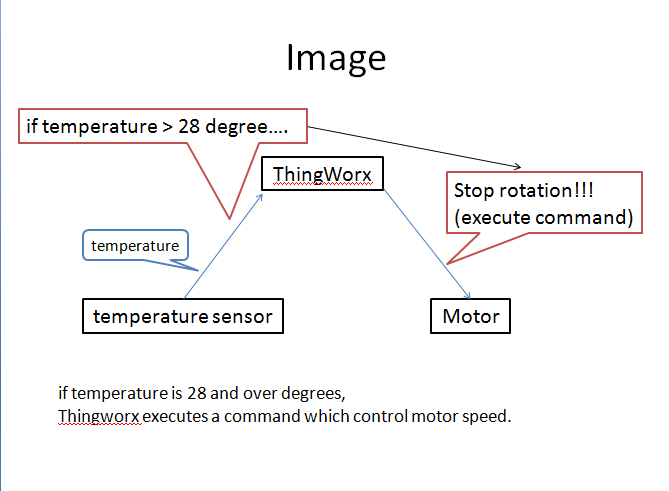
Now,i try to control speed of motor with temperature sensor and ThingWorx.
I attempt pictures which explains this thing.
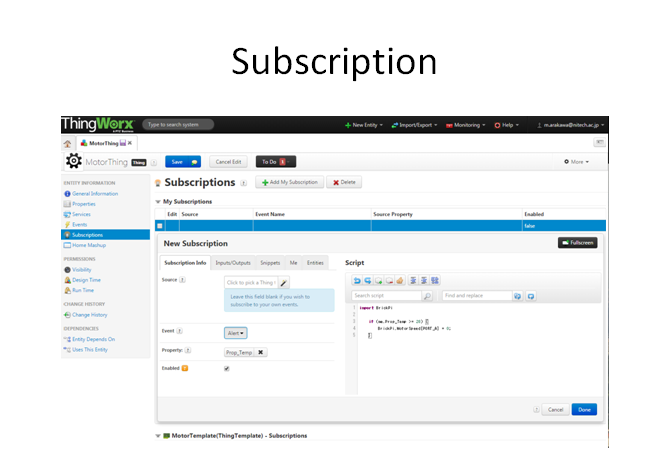
Is it possible to control motor speed by entering the script of motor_control in the space of subscriptions of the Thing's Entity Information like second picture?
If anyone knows information about this,please let me know something.
Solved! Go to Solution.
Labels:
- Labels:
-
Troubleshooting
- Tags:
- subscriptions
1 ACCEPTED SOLUTION
Accepted Solutions
Sep 01, 2015
04:23 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Sep 01, 2015
04:23 PM
Hi
I recently modified a Lego Technics Excavator so that it was controlled via ThingWorx and a Raspberry Pi rather than the Infra Red controller it comes with. I used the Java SDK to write the "agent" on the Pi. The Pi had a motor controller hat (from AdaFruit) on it. I had to write java code to create some methods within the Agent to control the motors, the hat uses Pulse Width Modulation to control motor speed writing Java to control this was a pain! By varying the values you use it is possible to control the motor speed with quite a range of speeds available. As the Excavator only needs motors to be on forwards, on backwards and off. I always run them at full speed.
So, short answer is yes. The bigger question is what hardware/software combination are you using to control the motor? You need to write code methods that control your motor - make sure these work outside of ThingWorx. Wrap these methods in ThingWorx Services as part of your agent. Then when your device connects, bring these services into the model definition (Services page, Browse Remote services button) once you have the service(s) there you can call them like any other ThingWorx service. Don't forget to have a subscription to turn the motor off when the temperature drops.
Remote services are very powerful and surprisingly quick in operation.
Regards
Ian
3 REPLIES 3
Sep 01, 2015
04:23 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Sep 01, 2015
04:23 PM
Hi
I recently modified a Lego Technics Excavator so that it was controlled via ThingWorx and a Raspberry Pi rather than the Infra Red controller it comes with. I used the Java SDK to write the "agent" on the Pi. The Pi had a motor controller hat (from AdaFruit) on it. I had to write java code to create some methods within the Agent to control the motors, the hat uses Pulse Width Modulation to control motor speed writing Java to control this was a pain! By varying the values you use it is possible to control the motor speed with quite a range of speeds available. As the Excavator only needs motors to be on forwards, on backwards and off. I always run them at full speed.
So, short answer is yes. The bigger question is what hardware/software combination are you using to control the motor? You need to write code methods that control your motor - make sure these work outside of ThingWorx. Wrap these methods in ThingWorx Services as part of your agent. Then when your device connects, bring these services into the model definition (Services page, Browse Remote services button) once you have the service(s) there you can call them like any other ThingWorx service. Don't forget to have a subscription to turn the motor off when the temperature drops.
Remote services are very powerful and surprisingly quick in operation.
Regards
Ian
Sep 01, 2015
09:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Sep 01, 2015
09:53 PM
Hi
Thank you for the information.
I use BrickPi for connecting Motor and RaspberryPi.And,the motor is LEGO parts of Mindstorms.
So,the code methods which controls motor_speed is Python.The contents of command is that
if temperature > 28:
BrickPi.MotorSpeed[PORT] = 0.
Should I write this code with Java and input this command in the space of Service Definition?
iot is very interesting and difficult....
Regards,
Hideyuki Shintani
Sep 03, 2015
03:52 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Notify Moderator
Sep 03, 2015
03:52 AM
I did something similar with the TW java SDK on a galileo board with a stepper motor.( similar to that one http://www.instructables.com/id/BYJ48-Stepper-Motor/)
1/ Create java methods to control motor rotation forward or backward i have 2 arguments ( angle, speed)
2/ Bind those methods as remote services
@ThingworxServiceDefinition( name="avanceMoteur", description="Forward engine by x degrees")
public void avanceMoteur ( @ThingworxServiceParameter( name="angle", description="rotation angle", baseType="NUMBER" ) Double angle, @ThingworxServiceParameter( name="speed", desc
3/ Write logic either as event/subsciption as you sugestted ( i recommend using a timer every x minutes instead of a property changed event, so that you leave enough time for the motor to reacdh the desired position) , or in a mashup ( ie in the example below, the motor control a mobile curtain ( up or down) that can be moved based on light and temp sensors to lower ambiant light)